当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
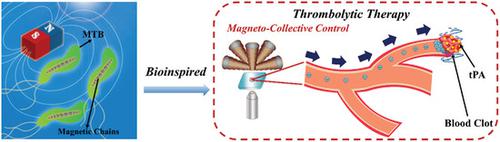
Bioinspired Soft Microrobots with Precise Magneto-Collective Control for Microvascular Thrombolysis.
Advanced Materials ( IF 29.4 ) Pub Date : 2020-05-20 , DOI: 10.1002/adma.202000366 Meihua Xie 1 , Wei Zhang 2 , Chengying Fan 2 , Chu Wu 3 , Qishuai Feng 1 , Jiaojiao Wu 1 , Yingze Li 1 , Rui Gao 1 , Zhenguang Li 1 , Qigang Wang 3 , Yu Cheng 1 , Bin He 2
Advanced Materials ( IF 29.4 ) Pub Date : 2020-05-20 , DOI: 10.1002/adma.202000366 Meihua Xie 1 , Wei Zhang 2 , Chengying Fan 2 , Chu Wu 3 , Qishuai Feng 1 , Jiaojiao Wu 1 , Yingze Li 1 , Rui Gao 1 , Zhenguang Li 1 , Qigang Wang 3 , Yu Cheng 1 , Bin He 2
Affiliation
|
New‐era soft microrobots for biomedical applications need to mimic the essential structures and collective functions of creatures from nature. Biocompatible interfaces, intelligent functionalities, and precise locomotion control in a collective manner are the key parameters to design soft microrobots for the complex bio‐environment. In this work, a biomimetic magnetic microrobot (BMM) inspired by magnetotactic bacteria (MTB) with speedy motion response and accurate positioning is developed for targeted thrombolysis. Similar to the magnetosome structure in MTB, the BMM is composed of aligned iron oxide nanoparticle (MNP) chains embedded in a non‐swelling microgel shell. Linear chains in BMMs are achieved due to the interparticle dipolar interactions of MNPs under a static magnetic field. Simulation results show that, the degree and speed of assembly is proportional to the field strength. The BMM achieves the maximum speed of 161.7 µm s−1 and accurate positioning control under a rotating magnetic field with less than 4% deviation. Importantly, the locomotion analyses of BMMs demonstrate the frequency‐dependent synchronization under 8 Hz and asynchronization at higher frequencies due to the increased drag torque. The BMMs can deliver and release thrombolytic drugs via magneto‐collective control, which is promising for ultra‐minimal invasive thrombolysis.
中文翻译:

具有精确磁-集体控制的生物启发型软微型机器人,用于微血管溶栓。
用于生物医学应用的新型软微型机器人需要模仿自然界生物的基本结构和集体功能。生物相容性界面,智能功能和精确的运动控制是集体为复杂生物环境设计软机器人的关键参数。在这项工作中,仿生磁性微型机器人(BMM)受趋磁细菌(MTB)的启发,具有快速的运动响应和精确的定位,可用于有针对性的溶栓。类似于MTB中的磁小体结构,BMM由嵌入在非膨胀微凝胶壳中的对齐的氧化铁纳米颗粒(MNP)链组成。BMM中的线性链是由于MNP在静磁场下的粒子间偶极相互作用而实现的。仿真结果表明,组装的程度和速度与场强成正比。BMM达到161.7 µm s的最大速度-1和在小于4%偏差的旋转磁场下的精确定位控制。重要的是,BMM的运动分析表明,在8 Hz下,频率依赖于同步,而在更高的频率下,由于阻力增加而引起的异步。BMM可以通过磁集合控制来递送和释放溶栓药,这有望用于超微创溶栓治疗。
更新日期:2020-07-01
中文翻译:
具有精确磁-集体控制的生物启发型软微型机器人,用于微血管溶栓。
用于生物医学应用的新型软微型机器人需要模仿自然界生物的基本结构和集体功能。生物相容性界面,智能功能和精确的运动控制是集体为复杂生物环境设计软机器人的关键参数。在这项工作中,仿生磁性微型机器人(BMM)受趋磁细菌(MTB)的启发,具有快速的运动响应和精确的定位,可用于有针对性的溶栓。类似于MTB中的磁小体结构,BMM由嵌入在非膨胀微凝胶壳中的对齐的氧化铁纳米颗粒(MNP)链组成。BMM中的线性链是由于MNP在静磁场下的粒子间偶极相互作用而实现的。仿真结果表明,组装的程度和速度与场强成正比。BMM达到161.7 µm s的最大速度-1和在小于4%偏差的旋转磁场下的精确定位控制。重要的是,BMM的运动分析表明,在8 Hz下,频率依赖于同步,而在更高的频率下,由于阻力增加而引起的异步。BMM可以通过磁集合控制来递送和释放溶栓药,这有望用于超微创溶栓治疗。


























 京公网安备 11010802027423号
京公网安备 11010802027423号