当前位置:
X-MOL 学术
›
Control Eng. Pract.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Output based bilateral adaptive control of partially known robotic systems
Control Engineering Practice ( IF 4.9 ) Pub Date : 2020-05-01 , DOI: 10.1016/j.conengprac.2020.104362 Luis Ángel Castañeda , Lev Guzman-Vargas , Isaac Chairez , Alberto Luviano-Juárez
Control Engineering Practice ( IF 4.9 ) Pub Date : 2020-05-01 , DOI: 10.1016/j.conengprac.2020.104362 Luis Ángel Castañeda , Lev Guzman-Vargas , Isaac Chairez , Alberto Luviano-Juárez
|
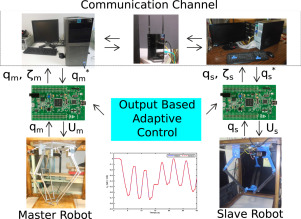
Abstract This paper describes the design and implementation of a robust adaptive bilateral observer based control to solve the trajectory tracking problem for a class of master–slave robotic systems. The output-based bilateral control uses an adaptive observer to estimate the force and the unmeasurable velocity state considering only the master–slave system order as well as the position measurements. The stability of the observer and controller is simultaneously proved via the second method of Lyapunov. A set of experimental tests proved the performance of the presented algorithm for a manipulation task in a bilateral teleoperated system based on two delta robots.
中文翻译:

部分已知机器人系统的基于输出的双边自适应控制
摘要 本文描述了基于鲁棒自适应双边观察器的控制的设计和实现,以解决一类主从机器人系统的轨迹跟踪问题。基于输出的双边控制使用自适应观测器来估计力和不可测量的速度状态,仅考虑主从系统顺序以及位置测量。通过李雅普诺夫的第二种方法同时证明了观测器和控制器的稳定性。一组实验测试证明了所提出的算法在基于两个 delta 机器人的双边远程操作系统中的操作任务的性能。
更新日期:2020-05-01
中文翻译:
部分已知机器人系统的基于输出的双边自适应控制
摘要 本文描述了基于鲁棒自适应双边观察器的控制的设计和实现,以解决一类主从机器人系统的轨迹跟踪问题。基于输出的双边控制使用自适应观测器来估计力和不可测量的速度状态,仅考虑主从系统顺序以及位置测量。通过李雅普诺夫的第二种方法同时证明了观测器和控制器的稳定性。一组实验测试证明了所提出的算法在基于两个 delta 机器人的双边远程操作系统中的操作任务的性能。

























 京公网安备 11010802027423号
京公网安备 11010802027423号