Sensors and Actuators A: Physical ( IF 4.6 ) Pub Date : 2020-03-20 , DOI: 10.1016/j.sna.2020.111973 Jinwon Jeong , Deasung Jang , Daegeun Kim , Daeyoung Lee , Sang Kug Chung
|
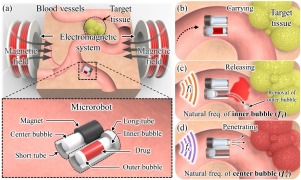
This paper presents a new type of microrobotic drug delivery technology where an electromagnetically actuated untethered microrobot swimming inside human blood vessels performs targeted drug delivery operations: carrying, releasing, and penetrating drugs to target tissues using acoustic excitation of bubbles. The novel microrobot is capable of not only transporting liquid forms of drugs in an aqueous medium but also wirelessly manipulating drugs without using complex mechanical parts. For the electromagnetic actuation of a microrobot, an electromagnetic system consisting of a pair of Helmholtz and Maxwell electric coils is fabricated. Using the developed electromagnetic system, the actuation of the microrobot made of a cylindrical neodymium magnet is successfully demonstrated in a T-shaped channel. For the drug manipulation, selective acoustic excitation of bubbles is investigated. The drug release actuation is studied using a microtube which is a drug container consisting of two bubbles with different volumes. Then, the effect of acoustic bubble-induced microstreaming on the drug penetration to tissues is investigated for three different conditions: pure diffusion, penetration with an acoustic wave, and microstreaming using an agarose gel. As a proof of concept, the proposed sequential drug manipulation (carrying, releasing, and penetrating) is experimentally demonstrated using the prototype of a microrobot enabling propulsion in a low Reynolds number environment using an electromagnetic system and drug manipulation using acoustic bubbles in a C-shaped channel filled with liquid. The proposed microrobot can be applied to various biomedical applications such as targeted drug delivery, cell manipulation, and microsurgery.
中文翻译:
基于声泡的药物操纵:使用电磁致动的微型机器人进行运载,释放和穿透,以进行有针对性的药物输送
本文介绍了一种新型的微机器人药物递送技术,该技术在人体血管内通过电磁驱动的无栓微型机器人进行有针对性的药物递送操作:利用气泡的声激发将药物携带,释放和渗透到目标组织。新型微型机器人不仅能够在水性介质中运输液体形式的药物,而且无需使用复杂的机械部件即可无线操作药物。为了微型机器人的电磁致动,制造了由一对亥姆霍兹和麦克斯韦电线圈组成的电磁系统。使用开发的电磁系统,在T形通道中成功演示了由圆柱形钕磁铁制成的微型机器人的致动。对于药物操纵,研究了气泡的选择性声激发。使用微管研究了药物释放的致动,该微管是由两个具有不同体积的气泡组成的药物容器。然后,在三种不同条件下研究了声泡诱导的微流对药物向组织的渗透的影响:纯扩散,声波渗透和使用琼脂糖凝胶的微流。作为概念的证明,使用微型机器人的原型通过实验演示了建议的顺序药物操纵(携带,释放和穿透),该原型可以使用电磁系统在低雷诺数环境中进行推进,并在C-形通道充满液体。

























 京公网安备 11010802027423号
京公网安备 11010802027423号