Sensors and Actuators A: Physical ( IF 4.6 ) Pub Date : 2020-03-12 , DOI: 10.1016/j.sna.2020.111950 Hangjia Dong , Tuanjie Li , Zuowei Wang , Yuming Ning
|
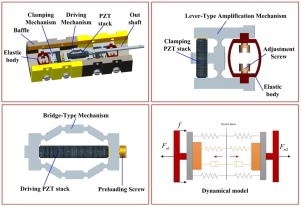
A piezoelectric ceramics (PZT) inchworm actuator is designed and tested in this work. The proposed actuator is mainly composed of a driving mechanism and two clamping mechanisms. The dynamical model of the actuator is established with considering the output nonlinearity of the PZT. The friction between the baffle and the clamping claw is calculated based on the fractal theory, and the slipping phenomenon is researched. The effects of the driving frequency, the voltage, and the stiffness of the flexible hinge on performances of the actuator are researched based on the dynamical model. The prototype is manufactured, and the experiment results verify the validity of the dynamical model and the designing scheme. The fabricated actuator achieves a maximum speed of 0.72 mm/s and a maximum displacement of 11 mm.
中文翻译:
基于足虫工作原理的压电致动器的设计与实验
在这项工作中设计并测试了压电陶瓷(PZT)蠕虫致动器。提出的致动器主要由驱动机构和两个夹紧机构组成。考虑到PZT的输出非线性,建立了执行器的动力学模型。基于分形理论,计算了挡板与卡爪之间的摩擦力,研究了滑移现象。基于动力学模型,研究了驱动频率,柔性铰链的电压和刚度对执行器性能的影响。制作了样机,实验结果验证了动力学模型和设计方案的有效性。制成的执行器的最大速度为0.72 mm / s,最大位移为11 mm。
























 京公网安备 11010802027423号
京公网安备 11010802027423号