当前位置:
X-MOL 学术
›
Phys. Rev. Fluids
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
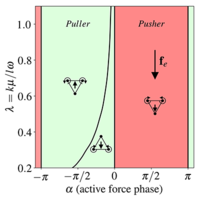
Deformable microswimmer in an external force field
Physical Review Fluids ( IF 2.7 ) Pub Date : 2020-03-12 , DOI: 10.1103/physrevfluids.5.033101 Mohd Suhail Rizvi , Philippe Peyla , Alexander Farutin , Chaouqi Misbah
Physical Review Fluids ( IF 2.7 ) Pub Date : 2020-03-12 , DOI: 10.1103/physrevfluids.5.033101 Mohd Suhail Rizvi , Philippe Peyla , Alexander Farutin , Chaouqi Misbah
|
External forces, such as gravity, play significant role in the swimming properties of autonomous biological microswimmers as well as artificial swimming robots. Here we have studied the influence of the external forces on the transport characteristics of the triangular bead-spring microswimmers. The microswimmer, formed by connecting three beads using three springs in an equilateral triangular arrangement, is capable of performing autonomous translational (“mover”) and rotational (“rotor”) motions. We show that for a mover triangle the application of a small external force results in the alignment of swimming direction with that of the external force, a phenomenon known as “gravitaxis.” We demonstrate that this gravitactic nature of the active triangle is purely due to the hydrodynamic interaction among the beads. Under large external force, however, the gravitactic nature is lost. This transition from gravitactic to nongravitactic motion of the microswimmer is characterized by a saddle node or pitchfork bifurcations (depending on nature of active forces), where the strength of the critical external force scales linearly with the active force amplitude, . However, for the rotor triangle only saddle node bifurcation is observed, which results in a vanishing angular velocity as the strength of the external force is increased. The critical value of the external force for the rotor, however, scales as . These findings will provide insights into the nature of biological swimming under gravity, especially the gravitactic microorganisms such as Chlamydomonas, as well as help in the design of underwater vehicles.
中文翻译:

外力场中的可变形微游泳器
外力(例如重力)在自主生物微泳者和人工游泳机器人的游泳性能中起着重要作用。在这里,我们研究了外力对三角珠弹簧微游泳器的传输特性的影响。通过使用三个弹簧以等边三角形排列连接三个小珠而形成的微掠器能够执行自主的平移(“移动”)和旋转(“转子”)运动。我们表明,对于动子三角形,施加较小的外力会使游动方向与外力对准,这种现象称为“重力”。我们证明了活性三角形的这种引力性质纯粹是由于珠粒之间的流体动力学相互作用。在大外力的作用下 但是,失去了引力性。微型游泳者从重力运动到非重力运动的过渡特征是鞍形结或干草叉分叉(取决于作用力的性质),其中临界外力的强度与作用力的幅度成线性比例,。然而,对于转子三角形,仅观察到鞍形节点分叉,这随着外力强度的增加而导致角速度消失。但是,转子外力的临界值按比例缩放。这些发现将提供有关重力下生物游泳的本质的见解,尤其是引力微生物如衣藻(Chlamydomonas),以及有助于水下航行器的设计。
更新日期:2020-03-12
中文翻译:
外力场中的可变形微游泳器
外力(例如重力)在自主生物微泳者和人工游泳机器人的游泳性能中起着重要作用。在这里,我们研究了外力对三角珠弹簧微游泳器的传输特性的影响。通过使用三个弹簧以等边三角形排列连接三个小珠而形成的微掠器能够执行自主的平移(“移动”)和旋转(“转子”)运动。我们表明,对于动子三角形,施加较小的外力会使游动方向与外力对准,这种现象称为“重力”。我们证明了活性三角形的这种引力性质纯粹是由于珠粒之间的流体动力学相互作用。在大外力的作用下 但是,失去了引力性。微型游泳者从重力运动到非重力运动的过渡特征是鞍形结或干草叉分叉(取决于作用力的性质),其中临界外力的强度与作用力的幅度成线性比例,。然而,对于转子三角形,仅观察到鞍形节点分叉,这随着外力强度的增加而导致角速度消失。但是,转子外力的临界值按比例缩放。这些发现将提供有关重力下生物游泳的本质的见解,尤其是引力微生物如衣藻(Chlamydomonas),以及有助于水下航行器的设计。

























 京公网安备 11010802027423号
京公网安备 11010802027423号