International Journal of Machine Tools and Manufacture ( IF 14.0 ) Pub Date : 2020-03-02 , DOI: 10.1016/j.ijmachtools.2020.103541 Vinh Nguyen , Joshua Johnson , Shreyes Melkote
|
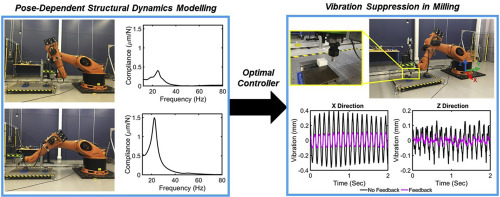
Six degree-of-freedom (6-dof) industrial robots are attractive alternatives to Computer Numerical Control (CNC) machine tools for milling of large parts because of their low-cost, greater versatility, and larger work volume. However, 6-dof industrial robots are significantly more compliant than CNC machine tools, which makes them prone to vibrations during milling. An additional complexity of industrial robots is their pose-dependent vibration characteristics. This paper presents a pose-dependent optimal control methodology to actively suppress tool tip vibrations generated by the periodic milling forces in robotic milling. Discretely sampled robot structural modal parameters as a function of robot configuration (pose) are used to develop a data-driven Gaussian Process Regression (GPR) model. The model is then utilized to solve the Linear Quadratic Regulator (LQR) optimal control problem to obtain pose-dependent controller gains necessary for vibration suppression. The pose-dependent controller is implemented on a 6-dof industrial robot and its performance evaluated through process-independent offset mass experiments and through milling experiments. The methodology is shown to be effective in decreasing the tool tip vibrations and improving the machining accuracy in robotic milling.
中文翻译:
使用最佳控制的自动铣削中的主动振动抑制
六自由度(6-dof)工业机器人是用于大型零件铣削的计算机数控(CNC)机床的有吸引力的替代产品,因为它们的成本低,用途广泛且工作量大。但是,6-dof工业机器人比CNC机床具有更高的适应性,这使它们在铣削过程中容易产生振动。工业机器人的另一个复杂之处是其与姿势有关的振动特性。本文提出了一种基于姿态的最佳控制方法,以主动抑制机器人铣削中周期性铣削力产生的刀尖振动。离散采样的机器人结构模态参数(根据机器人配置(姿势)的函数)用于开发数据驱动的高斯过程回归(GPR)模型。然后,该模型用于解决线性二次调节器(LQR)的最佳控制问题,以获得振动抑制所需的与姿态有关的控制器增益。依赖于姿势的控制器在6 dof工业机器人上实现,并且其性能通过与过程无关的偏移质量实验和铣削实验进行评估。实践证明,该方法可有效减少刀尖振动并提高机器人铣削的加工精度。


























 京公网安备 11010802027423号
京公网安备 11010802027423号