Sensors and Actuators A: Physical ( IF 4.6 ) Pub Date : 2020-02-19 , DOI: 10.1016/j.sna.2020.111907 Jianping Li , Junjie Cai , Jianming Wen , Yu Zhang , Nen Wan
|
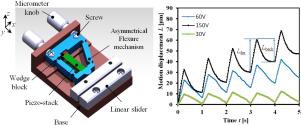
With the help of the parasitic motion of the asymmetrical trapezoid flexure mechanism, a piezoelectric actuator which could achieve linear motion with large working stroke has been presented and inspected. The structure of the asymmetrical trapezoid flexure mechanism and the motion principle of the proposed piezoelectric actuator are introduced and investigated in details. Finite Element Method (FEM) has been exploited, and an experimental system has been built up to study the working performance of the proposed piezoelectric actuator. Simulation results confirm that the parasitic motion could be achieved by the asymmetrical trapezoid flexure mechanism. Additionally, the dynamic model has been proposed for the investigation. Experimental results show that the presented actuator could obtain continuous linear motion with large working stroke by the parasitic motion of the proposed asymmetrical trapezoid flexure mechanism. The minimum stepping displacement of the proposed actuator is 0.68 μm; the maximum speed is 4676 μm/s; the output force could be as large as 91.3 g. This study shows a meaningful idea of the utilization of the asymmetrical trapezoid flexure mechanism for the design of novel piezoelectric actuators.
中文翻译:
具有不对称梯形弯曲机构的寄生型压电致动器
借助于不对称梯形挠曲机构的寄生运动,提出并检查了一种可实现大工作行程线性运动的压电致动器。介绍并研究了不对称梯形挠曲机构的结构和所提出的压电致动器的运动原理。已经开发了有限元方法(FEM),并建立了一个实验系统来研究所提出的压电执行器的工作性能。仿真结果证实,通过非对称梯形挠曲机构可以实现寄生运动。另外,已经提出了用于研究的动态模型。实验结果表明,所提出的执行器通过所提出的非对称梯形挠曲机构的寄生运动可以获得大工作行程的连续线性运动。建议执行器的最小步进位移为0.68μm;最大速度为4676μm/ s; 输出力可能高达91.3 g。这项研究显示了利用不对称梯形挠曲机构设计新型压电致动器的有意义的想法。

























 京公网安备 11010802027423号
京公网安备 11010802027423号