当前位置:
X-MOL 学术
›
Mater. Today
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Bioinspired footed soft robot with unidirectional all-terrain mobility
Materials Today ( IF 24.2 ) Pub Date : 2020-05-01 , DOI: 10.1016/j.mattod.2019.12.028 Xin Wang , Baisong Yang , Di Tan , Qian Li , Bin Song , Zhong-Shuai Wu , Aránzazu del Campo , Michael Kappl , Zuankai Wang , Stanislav N. Gorb , Sheng Liu , Longjian Xue
Materials Today ( IF 24.2 ) Pub Date : 2020-05-01 , DOI: 10.1016/j.mattod.2019.12.028 Xin Wang , Baisong Yang , Di Tan , Qian Li , Bin Song , Zhong-Shuai Wu , Aránzazu del Campo , Michael Kappl , Zuankai Wang , Stanislav N. Gorb , Sheng Liu , Longjian Xue
|
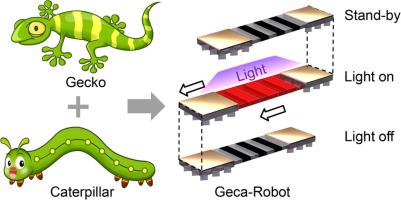
Abstract Soft robots consisting of stimuli-responsive soft materials are expected to achieve tasks otherwise impossible by robots with conventional rigid counterparts. In spite of good progress made over the past several years, robot mobility on various surfaces remains challenging. Here, we report a footed soft robot with good terrain adaptability and large load carrying capability by mimicking the anisotropic friction of gecko setae and the gait of caterpillars. The robot, termed as Geca-Robot, is composed of gecko-inspired triangular micropillars as the feet and alternating cuboids of polydimethylsiloxane (PDMS) and graphene–PDMS as the muscle. Geca-Robot is remotely powered by light with wavelengths ranging from ultraviolet to infrared, and moves with a caterpillar-like gait. The gecko-inspired feet allows Geca-Robot to unidirectionally travel on terrains of varying roughness, slope, and dryness with a wide working temperature range, and to carry loads weighing approximately 50 times its own mass. Geca-Robot will inspire the creation of further soft robot designs for various natural terrains.
中文翻译:

具有单向全地形移动能力的仿生足式软体机器人
摘要 由刺激响应软材料组成的软机器人有望完成传统刚性机器人无法完成的任务。尽管过去几年取得了良好的进展,但机器人在各种表面上的移动性仍然具有挑战性。在这里,我们通过模仿壁虎刚毛的各向异性摩擦和毛虫的步态,报告了一种具有良好地形适应性和大承载能力的足式软机器人。该机器人被称为 Geca-Robot,由受壁虎启发的三角形微柱作为脚,聚二甲基硅氧烷 (PDMS) 和石墨烯-PDMS 的交替长方体作为肌肉组成。Geca-Robot 由波长范围从紫外线到红外线的光远程驱动,并以类似毛毛虫的步态移动。受壁虎启发的脚部使 Geca-Robot 能够在不同粗糙度、坡度和干燥度的地形上单向行走,工作温度范围宽,并能承载重量约为自身质量 50 倍的负载。Geca-Robot 将激发更多针对各种自然地形的软机器人设计的创造。
更新日期:2020-05-01
中文翻译:
具有单向全地形移动能力的仿生足式软体机器人
摘要 由刺激响应软材料组成的软机器人有望完成传统刚性机器人无法完成的任务。尽管过去几年取得了良好的进展,但机器人在各种表面上的移动性仍然具有挑战性。在这里,我们通过模仿壁虎刚毛的各向异性摩擦和毛虫的步态,报告了一种具有良好地形适应性和大承载能力的足式软机器人。该机器人被称为 Geca-Robot,由受壁虎启发的三角形微柱作为脚,聚二甲基硅氧烷 (PDMS) 和石墨烯-PDMS 的交替长方体作为肌肉组成。Geca-Robot 由波长范围从紫外线到红外线的光远程驱动,并以类似毛毛虫的步态移动。受壁虎启发的脚部使 Geca-Robot 能够在不同粗糙度、坡度和干燥度的地形上单向行走,工作温度范围宽,并能承载重量约为自身质量 50 倍的负载。Geca-Robot 将激发更多针对各种自然地形的软机器人设计的创造。


























 京公网安备 11010802027423号
京公网安备 11010802027423号