npj Flexible Electronics ( IF 14.6 ) Pub Date : 2018-05-14 , DOI: 10.1038/s41528-018-0028-y Xiaogang Guo , Xueju Wang , Dapeng Ou , Jilong Ye , Wenbo Pang , Yonggang Huang , John A. Rogers , Yihui Zhang
|
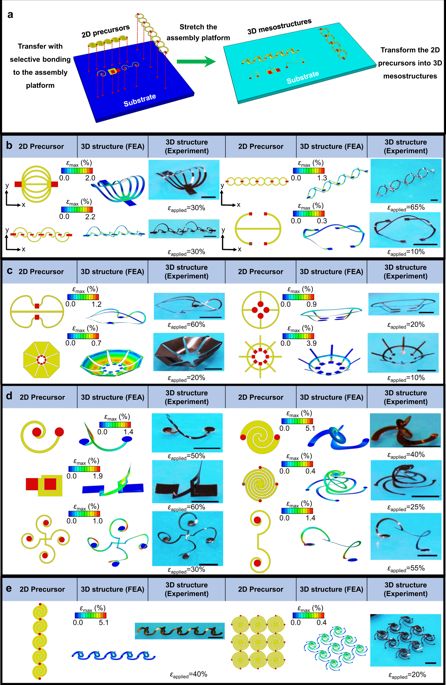
Recent research establishes methods of controlled mechanical assembly as versatile routes to three-dimensional (3D) mesostructures from patterned 2D films, with demonstrated applicability to a broad range of materials (e.g., semiconductors, polymers, metals, and their combinations) and length scales (e.g., from sub-microscale to centimeter scale). Previously reported schemes use pre-stretched elastomeric substrates as assembly platforms to induce compressive buckling of 2D precursor structures, thereby enabling their controlled transformation into 3D architectures. Here, we introduce tensile buckling as a different, complementary strategy that bypasses the need for a pre-stretched platform, thereby simplifying the assembly process and opening routes to additional classes of 3D geometries unobtainable with compressive buckling. A few basic principles in mechanics serve as guidelines for the design of 2D precursor structures that achieve large out-of-plane motions and associated 3D transformations due to tensile buckling. Experimental and computational studies of nearly 20 examples demonstrate the utility of this approach in the assembly of complex 3D mesostructures with characteristic dimensions from micron to millimeter scales. The results also establish the use of nonlinear mechanics modeling as a mechanism for designing systems that yield desired 3D geometries. A strain sensor that offers visible readout and large detectable strain range through a collection of mechanically triggered electrical switches and LEDs serves as an application example.
中文翻译:
通过拉伸屈曲控制复杂的3D介观结构和应变传感器的机械组装
最近的研究建立了受控的机械组装方法,作为从图案化2D薄膜到三维(3D)介观结构的通用途径,并证明了其对多种材料(例如半导体,聚合物,金属及其组合)和长度尺度的适用性(例如,从亚微米级到厘米级)。先前报道的方案使用预拉伸的弹性体基底作为组装平台,以引起2D前驱体结构的压缩屈曲,从而使其可控地转变为3D体系结构。在这里,我们将拉伸屈曲引入作为一种不同的补充策略,从而绕过了对预拉伸平台的需求,从而简化了组装过程,并打开了通过压缩屈曲无法获得的其他3D几何类型的途径。力学中的一些基本原理可作为2D前体结构设计的准则,该结构可实现大的平面外运动以及由于拉伸屈曲而产生的相关3D变换。对近20个示例的实验和计算研究表明,该方法可用于组装特征尺寸从微米到毫米的复杂3D介观结构。结果还确立了将非线性力学建模用作设计可产生所需3D几何形状的系统的机制的用途。通过一系列机械触发的电子开关和LED提供可见读数和较大可检测应变范围的应变传感器就是一个应用示例。


























 京公网安备 11010802027423号
京公网安备 11010802027423号