当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Slit Tubes for Semisoft Pneumatic Actuators
Advanced Materials ( IF 29.4 ) Pub Date : 2018-01-15 , DOI: 10.1002/adma.201704446 Lee Belding 1 , Bilge Baytekin 2 , Hasan Tarik Baytekin 2 , Philipp Rothemund 1, 3, 4 , Mohit S. Verma 1 , Alex Nemiroski 1 , Dan Sameoto 1, 5 , Bartosz A. Grzybowski 2 , George M. Whitesides 1, 4, 6
Advanced Materials ( IF 29.4 ) Pub Date : 2018-01-15 , DOI: 10.1002/adma.201704446 Lee Belding 1 , Bilge Baytekin 2 , Hasan Tarik Baytekin 2 , Philipp Rothemund 1, 3, 4 , Mohit S. Verma 1 , Alex Nemiroski 1 , Dan Sameoto 1, 5 , Bartosz A. Grzybowski 2 , George M. Whitesides 1, 4, 6
Affiliation
|
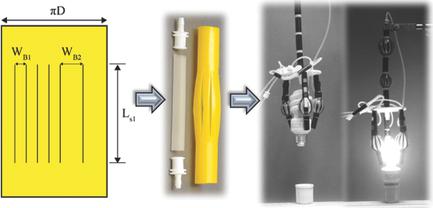
This article describes a new principle for designing soft or ‘semisoft’ pneumatic actuators: SLiT (for SLit‐in‐Tube) actuators. Inflating an elastomeric balloon, when enclosed by an external shell (a material with higher Young's modulus) containing slits of different directions and lengths, produces a variety of motions, including bending, twisting, contraction, and elongation. The requisite pressure for actuation depends on the length of the slits, and this dependence allows sequential actuation by controlling the applied pressure. Different actuators can also be controlled using external “sliders” that act as reprogrammable “on‐off” switches. A pneumatic arm and a walker constructed from SLiT actuators demonstrate their ease of fabrication and the range of motions they can achieve.
中文翻译:

半软式气动执行器的狭缝管
本文介绍了设计软或“半软”气动执行器的新原理:SLiT(用于SLit-in-Tube)执行器。当弹性气球膨胀时,被包含不同方向和长度的缝隙的外壳(杨氏模量较高的材料)包围时,会产生各种运动,包括弯曲,扭曲,收缩和伸长。致动所需的压力取决于狭缝的长度,并且这种依赖性允许通过控制施加的压力来顺序致动。也可以使用外部“滑块”控制不同的执行器,这些滑块用作可重新编程的“通断”开关。由SLiT执行器构成的气动臂和助步器展示了其易于制造以及可实现的运动范围。
更新日期:2018-01-15
中文翻译:
半软式气动执行器的狭缝管
本文介绍了设计软或“半软”气动执行器的新原理:SLiT(用于SLit-in-Tube)执行器。当弹性气球膨胀时,被包含不同方向和长度的缝隙的外壳(杨氏模量较高的材料)包围时,会产生各种运动,包括弯曲,扭曲,收缩和伸长。致动所需的压力取决于狭缝的长度,并且这种依赖性允许通过控制施加的压力来顺序致动。也可以使用外部“滑块”控制不同的执行器,这些滑块用作可重新编程的“通断”开关。由SLiT执行器构成的气动臂和助步器展示了其易于制造以及可实现的运动范围。

























 京公网安备 11010802027423号
京公网安备 11010802027423号